多电/全电航天系统中的电力推进系统、电驱动系统、启动/发电系统和环境控制系统等都在朝着高功率密度、高效率、高可靠性的方向发展。电机系统作为上述应用领域的核心单元,意义重大。基于超高速电机(UHSM)的电驱动系统具有功率密度高、体积小、重量轻等明显优势,非常适合航天领域的性能要求。对于多电/全电航天系统的发展具有重要意义。
除了航空航天领域,对于一些现代工业应用,如高速离心压缩机、微型燃气轮机起动/发电机、飞轮储能等,都可以实现直接驱动结构,可以显着降低体积、质量和性能。维护费用。同时大大提高了可靠性。与其他类型的电机相比阻尼电机的作用,超高速永磁电机在功率密度和效率方面具有更显着的优势。近年来,它们呈现出逐渐取代其他类型电机的趋势。研究意义和实用价值都很大。
对于超高速永磁电机而言,性能卓越的驱动系统是发挥其潜力的关键。现有的驱动系统通常采用数字微控制器(Unit,MCU)来实现数字驱动。但由于超高速永磁电机工作基频较高,在应用磁场定向控制(Field阻尼电机的作用,FOC)策略时,系统延时对系统稳定性的影响难以忽视。
对此,南京航空航天大学自动化学院研究员鲍旭聪、王小林、谷聪、石腾瑞等人在《电工学报》2022年第10期撰文,准确重构电流环的动态模型,并对其进行系统分析。延迟引起的交叉耦合和延迟效应对高基频工作条件下系统稳定性的影响。
在此基础上,他们提出了一种适用于超高速电机的基于双采样电流预测的阻尼-积分电流环调节机制,通过补偿系统阻尼比来消除额外的交叉耦合效应。此外,研究人员还设计了分段执行双采样电流预测算法,可以实现不依赖任何参数的下一拍反馈电流预测,有效补偿系统稳定裕度。以上两项措施为保障特高频系统的整体稳定性提供了有力保障。

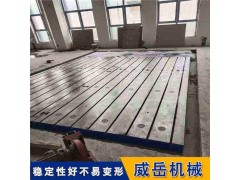
图1 超高速永磁电机驱动系统实验平台
他们的具体任务包括:
1)在考虑高基频系统延时的情况下,重构电流环的动态模型并精确建模,深入分析延时对系统稳定性的影响:①延时为在原电流环动态模型的正向通道和反馈通道分别引入额外的交叉耦合,从而降低系统阻尼比,降低电流环的稳定性,严重时甚至造成负阻尼比,造成系统不稳定;②延时效应会显着降低系统稳定裕度,导致动态超调量增加。
2) 基于附加交叉耦合后电流环动态模型变化的考虑,提出了适用于超高速电机驱动系统的阻尼-积分电流调节器,并给出了实现所需的补偿条件推导阻尼比,给出设计原则。所提方案避免了传统超高速电机驱动系统阻尼比与闭环带宽之间的矛盾,实现了高基频下系统阻尼比的有效补偿,保证了系统的全局稳定性。 .
3) 针对时延效应导致的系统稳定裕度降低,提出了一种适用于高基频低载频比的分段执行双采样电流预测算法,并将预测电流值作为反馈电流对于电流环的控制有效地补偿了稳定裕度,抑制了动态超调,实现了电流环的控制性能接近理想阻尼比,电流环的动态性能更好。当前预测器不需要依赖任何模型参数,实现简单,鲁棒性强。
为验证所提改进电流环调节机制的性能,研究人员基于一台/min/110W超高速微型永磁电机进行了仿真和实验分析,充分验证了所提改进电流环调节机制的有效性和有效性。改进的电流环控制方案。优势。
本文编译自《电工技术学报》2022年第10期,论文题目为《超高速永磁电机驱动系统电流环稳定性分析及改进设计》。该项目得到国家自然科学基金和江苏省自然科学基金的资助。